First remote testing using Mcity 2.0 conducted with Purdue and U-M researchers

Engineers in Indiana tapped the full breadth of Mcity’s testing capabilities to identify problems and refine their algorithm.
ANN ARBOR—From more than 200 miles away, Purdue University researchers were able to test their autonomous vehicle (AV) technology using the University of Michigan’s real-world test track in Ann Arbor, and challenge it using both real and virtual cars and pedestrians.
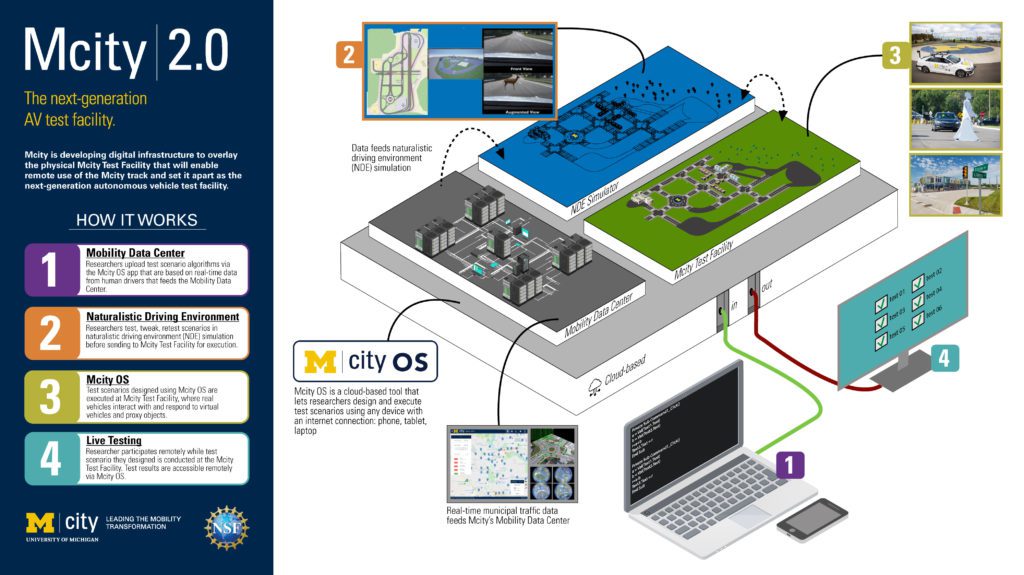
This first remote use of the Mcity Test Facility came 14 months after U-M announced plans to develop Mcity 2.0—a further enhancement of the world’s first purpose-built test environment for AVs and connected vehicles and technologies. Helped by a $5.1 million, 4-year grant from the National Science Foundation (NSF), the Mcity 2.0 project makes the facility’s technology, datasets and physical test track available to researchers anywhere in the U.S. without requiring them to travel to Michigan.
Engineers from Purdue’s Connected Automated and Resilient Transportation Lab are currently working on a research project that focuses on how to systematically evaluate safety and other AV performance measures. They have their own SAE Level 4 autonomous vehicle for research in West Lafayette, Indiana. For testing, they use one of the parking lots at Ross-Ade Stadium, home of the Boilermakers football team.
What they do not have at Purdue is access to tools that would answer their questions about how their AV algorithms perform in a realistic traffic environment. Or how they can integrate algorithms with other elements, such as infrastructure applications, 5G communication, and interactions with traffic signals.
“We’re not able to answer these questions because, one, we do not have a dedicated city testing facility at Purdue, and it’s unsafe to test on public roads,” said Yiheng Feng, an assistant professor of civil engineering at Purdue. “We do not have a realistic traffic environment to interact with. And we do not have good infrastructure support so we can integrate our algorithms with other applications.”
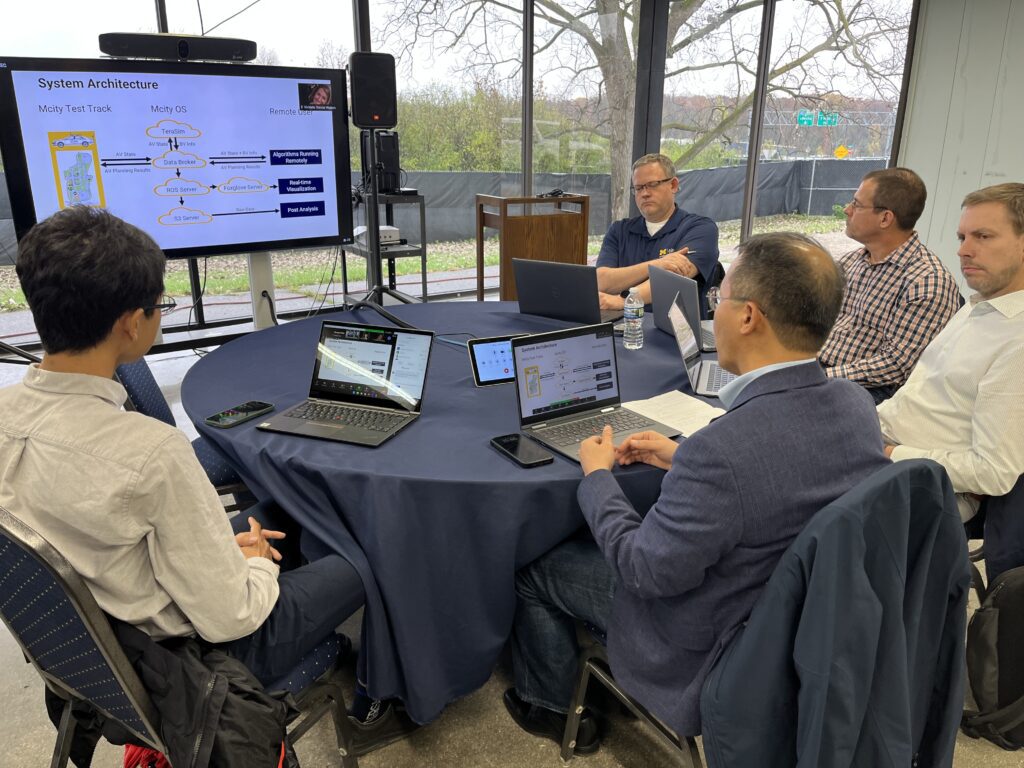
Mcity’s team gathers inside a building at the Mcity Test Facility to observe the first remote use of the track using Mcity 2.0, which overlays digital infrastructure on the track’s physical infrastructure to enable remote use by researchers nationwide. From left, Sean Shen, managing director of the Michigan Traffic Lab; Henry Liu, director of Mcity; Greg McGuire, managing director, Mcity; Greg Stevens, research director, Mcity and Derek Johnson, chief engineer, Mcity.
During the November test, U-M researchers and staff members sat at round banquet tables in front of a 65-inch monitor inside a building adjacent to the Mcity test track in Michigan. The screen showed Purdue researchers and staff on-campus in Indiana, and NSF representatives who joined remotely from Washington, DC. In all, about 30 people were at Mcity or online.
Inside the Mcity Test Facility, standing in for Purdue’s research vehicle, was Mcity’s AV research platform, programmed to use a path planning algorithm developed by the Purdue team.
The groups watched their screens closely as the remote testing framework was put to its first test. It’s a process that works in stages.
Prior to testing, U-M sent Purdue’s team a high-resolution digital map of Mcity’s track, as well as real-time information generated by the test AV at the track, including speed and position. Computer-generated cars, called background vehicles, were added to the simulation.
“When we receive all of this information at Purdue, we use it as input for our motion planning algorithm and generate high-level control commands in terms of vehicle speed and the steering wheel angle that are then executed by the vehicle at Mcity,” Feng explained to the participants.
While the testing was underway, Feng and the other researchers at Purdue were able to see multiple camera views from onboard the AV under test, as well as views from fixed cameras along the test track. They could also see a digital representation of the physical AV’s dashboard, with information on throttle, braking, current speed and targeted speed.
A digital map of the test facility showed the randomly-generated traffic interactions between the AV and the background vehicles. Feng and his team did not know in advance what those interactions – being cut off by another vehicle, a virtual pedestrian crossing the street, even a crash – might be.
When the testing was over, Purdue had uncovered issues with its algorithm the researchers otherwise might not have discovered easily or quickly.
“Through the Mcity 2.0 test, we were able to identify problems related to safety and comfort and refine our original algorithm, all without leaving campus.”
Yiheng Feng, Assistant Professor of Civil Engineering, Purdue University
“The original path planning algorithm was implemented and tested in our own vehicle here at Purdue,” Feng said. “Through the Mcity 2.0 test, we were able to identify problems related to safety and comfort and refine our original algorithm, all without leaving campus.”
While Mcity 2.0 enables external researchers and U-M to share necessary data to make the simulations work, it also protects what needs protecting.
“Remote users are running their algorithms on their own computers,” said Mcity Director Henry Liu, who is also a professor of civil and environmental engineering at U-M. ”This protects their intellectual property.”
“Remote users are running their algorithms on their own computers,” said Mcity Director Henry Liu, who is also a professor of civil and environmental engineering at U-M. ”This protects their intellectual property.”
Henry Liu, Director, Mcity and Professor of Civil and Environmental Engineering at U-M
Nationally, as at Purdue, universities’ research efforts in artificial intelligence and automation in transportation can be hindered by lack of access to real-world data, to high-quality simulation environments, and to physical testing facilities. By overlaying digital infrastructure on physical infrastructure, Mcity 2.0 can provide all three, and help overcome a barrier to validating research results and promoting the findings to encourage more research and encourage real-world deployments of these technologies.
“NSF’s investment in computing and communication infrastructure for Mcity 2.0, together with the creativity of the Mcity 2.0 team, is upgrading what was previously a well-equipped test track to provide a unique, world-class research resource that is accessible for all campuses,” said Susan Margulies, NSF assistant director for engineering.
“Autonomous vehicle researchers from institutions all around the nation will be able to remotely access Mcity 2.0’s most sophisticated features,” she said, “including seamless mixed reality for integration of physical and virtual vehicles, and intelligent adversarial agents for greatly reduced testing times.”
The Purdue testing demonstrated one of five use cases Mcity is developing for Mcity 2.0 as part of the NSF research project. The additional use cases are still in development, but will likely include research topics such as sensor and communications cybersecurity, intersection infrastructure coordination, and energy efficiency in routing.