Remote Testing of Joint Control of AVs and Traffic Signals
The Mcity 2.0 collaborator for this use case was the intelligent Urban Transportation Systems (iUTS) Lab, led by Jeff Ban, Professor of Civil and Environmental Engineering at the University of Washington. Professor Ban and the iUTS have been working on an algorithm to control traffic signals more intelligently based on data from connected vehicles. Seeing as how this scenario is fairly difficult (if not dangerous) to test in the real world. They needed a safe way to experiment with it. This made this research group an excellent use case for Mcity 2.0. With the collaboration of Mcity and the Mcity 2.0 platform, the iUTS was able to test scenarios of 25%, 50%, 75%, and 100% CAV penetration. They did so in pure simulation, and mixed reality (with a real vehicle and simulated background vehicles).
Goals and Objectives
The iUTS wanted to test the performance of their signal controlling framework, the “SVCC” Multiscale Signal-Vehicle Coupled Control in real-world and mixed traffic environments. They also wanted to explore how they might extend this platform to a large urban environment and different penetration levels.
The iUTS also has similar encumbrances to those encountered by the Purdue team, featured in use case 1. UW has no test facility, They have no access to advanced infrastructure. And it is unsafe to test on public roads, so they cannot test with background vehicles.
The encumbrances were easily overcome as Mcity had already vetted that capability through use case 1. The iUTS was also able to test all of their planned scenarios and hone their algorithm while proving that the algorithm does indeed perform well under almost any penetration level. The performance metrics tested were fuel consumption, waiting time, time loss, queue length, and number vehicles (through the intersection).
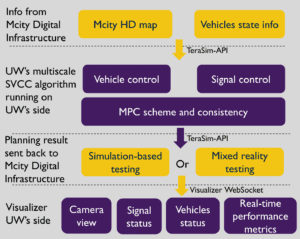
Data Flow Architecture
Integration & Collaboration
The team from the University of Washington was able to participate in real-time by viewing various feeds made accessible by the Mcity 2.0 platform. They were also able to control how many background vehicles were “connected” and therefore visible to their algorithm, thus simulating different levels of penetration.
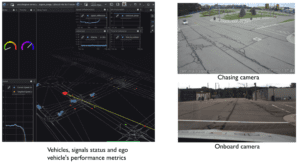
Remote Visualizations
Features & Capabilities
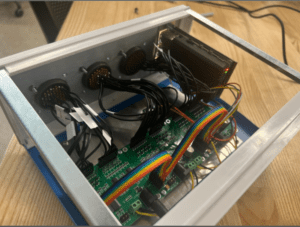
A prototype was created to allow a researcher to immediately change the states of traffic signals via an API. The prototype is a Raspberry Pi connected to the Mcity OS network and directly to the traffic signals via typical A, B, and C connectors. The local Malfunction Monitoring Unit (MMU) was configured to allow all states, so that an immediate change from the research team would not trigger a fault. A simple REST API was written and installed on the Raspberry Pi so that the research team need only get on the Mcity OS network in order to control the state.