Remote AV Motion Planning Algorithm
This use case was the original proof of concept for Mcity 2.0. The Connected Automated and Resilient Transportation (CART) Lab, led by Dr. Yiheng Feng, Assistant Professor of Civil Engineering at Purdue University, were the guest remote researchers. Our goals were to establish that this kind of remote collaboration is possible, and that it is beneficial for all participants. The CART Lab does not have access to a test facility, no advanced infrastructure, nor can it run tests with background/challenge vehicles due to safety concerns tied to testing on public roads. These limitations were successfully overcome by the Mcity 2.0 platform.
Goals and Objectives
Since this was the first use case for Mcity 2.0, the focus was on proof of concept. This first step in this was determining if the current technology architecture at Mcity was adequate to support mixed-reality remote collaboration. The second step was to measure how valuable such a remote collaboration could be.
Both of these goals were met successfully. While the latencies measured were on the edge of acceptable, they were still good enough to provide for a valuable experience. The remote team at Purdue was able to visualize all aspects of the test in real time.
Integration & Collaboration
Working with the Mcity 2.0 platform allowed the CART lab access to a physical vehicle in a mixed-reality setting. The planning algorithm was carried out at Purdue University (some 250 miles away from the Mcity facility). The planning results were then sent to Mcity, to the real vehicle on the track. From there, the planning results were translated into drive-by-wire actuation. The real vehicle’s position was then shared with Purdue and TeraSim. TeraSim generated background vehicles to interact with Purdue’s vehicle under test.
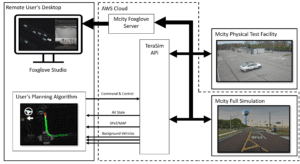
TeraSim API Architecture
Features & Capabilities
The data generated by both the real vehicle (position, ,dashcam feed, and video feeds from the infrastructure) and the simulation (the positions and trajectories of all of the background vehicles) was visualized in real time by remote participants and in-person attendants alike.
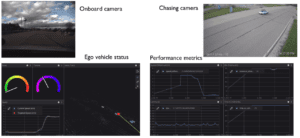
Remote Visualization of Mcity Testing
Using the data collected, Purdue was able to refine their algorithm to reduce the time to collision (TTC) in almost all scenarios. This was made possible by the feedback from having the background vehicles from TeraSim as part of the test. These refinements also improved passenger comfort as deceleration was more smooth. This proof of concept also showcased how useful this kind of remote collaboration is.